
Novel Concept of Using Electrical Submersible Pumps as Immersion Heaters
Electrical submersible pumps (ESPs) are a common source of artificially lifting wellbore fluids. When reservoir fluids, hundreds of feet below the earth’s surface, do not have enough energy to rise to the surface, electrical submersible pumps are deployed. The pumps reduce the bottom hole pressure and impart sufficient energy so that fluid lifts up.
Common applications of ESPs include oil and gas production, thermal heating including district heating, lifting slurries from the deep mines, and dewatering of the coal mines. They lift fluids to the surface economically. Without other lifting methods, achieving this is difficult and uneconomical.
The electrical submersible pumps generate heat as a byproduct of their operation. This heat is usually considered a nuisance because it derates the motor and reduces the system’s lifespan. The application is designed to ensure a sufficient flow rate is generated around the electrical submersible motor, so that lifting fluid cools the motor. This article explores the novel concept of using the submersible motor as an immersion heater thus putting that heat generated to a useful purpose.
Major components of ESP
Electrical submersible pumps consist of four main assemblies which are all flanged connected to make an ESP. They have a submersible motor at the bottom, connecting to a protector which connects to a gas separator or intake. The intake or gas separator connects via flange connection to the pump.
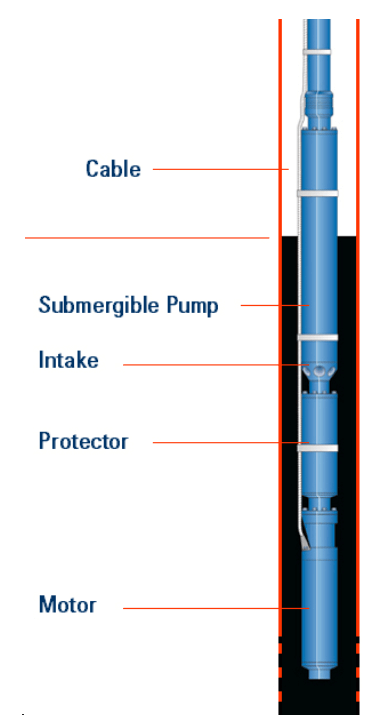
Figure 1: Major components of an ESP System
The submersible motor transmits the torque to the pump through a shaft. This shaft connects through a coupling to the shaft in the protector. From there, it connects through a coupling to the intake or gas separator. Finally, the shaft connects to the shaft of the pump mated by the coupling. The downhole motor consists of a rotor and stator. Figure 1 shows the major parts of the downhole system.
The type of motor discussed in this article concentrates on a 2 pole 60Hz squirrel cage induction motor. There are few other variations of submersible motors that can be used—e.g. permanent magnet motors.
Motor Choice
The choice of motor directly impacts the amount of heat it generates. Each motor consists of a rotor and a stator. The stator contains electrical winding connected to three-phase power 460-480V. As the alternating current changes in the sinusoidal waveform, it creates a rotating magnetic field. This creates a current in the rotor windings which creates a magnetic field of its own. The interaction of two magnetic fields yields the turning force or torque. Part of this current is converted to heat energy due to electrical losses in the motor windings and some heat is attributed to the frictional losses but the amount of heat generated by the frictional losses is minimal compared to the electrical losses.
One important part is the protector attached to the submersible motor. This acts like a hydraulic compensation system and seal between the harsh environment outside and clean motor oil. The submersible motor is filled with the dielectric oil, providing lubrication to the rotor bearings and cooling to the windings. As the motor temperature increases the oil expands and the protector provides the space for the expanding oil to accumulate. The protector has elastomer bags which expand and contract as the oil volume changes.
Also read: Exploring the components, function and Types of Oil Pumps: Comprehensive guide
Why ESP as Immersion Heater?
The main advantage of using ESP as an immersion heater comes in applications where the API density of the oil or pumped fluid is less than 10. API density measures the density of petroleum products against water density. If the API is greater than 10, then the petroleum product is lighter than water so it floats. API is less than 10 then the petroleum product is heavier and sinks.
Other Applications of ESP Immersion Heaters
Oil production and refining. The oil sands are so viscous that steam is used to reduce the viscosity of the bitumen.
Mining applications include viscous slurries, which must be heated and pumped to the surface.
Steam is used in many downhole applications to reduce the viscosity of fluids. But, that means more capital-intensive surface facilities and more carbon emissions. Another aspect to that is more complicated downhole architecture due to steam injection which warrants either injection through a bypass tubing or another hole drilled nearby to inject steam in the reservoir.
Another downside of using steam to reduce the viscosity of the oil is that borehole temperature variations can damage the reservoir. This can cause expensive workovers or, in worst cases, abandonment. If the reservoir energy is low and artificial lifts are needed to lift fluid to the surface then one should use an electrical submersible pump to not only pump the fluid to the surface but also heat it up.
Effect of Temperature on Viscosity
As mentioned earlier, the motor’s winding creates a “rotating magnetic field.” This is due to the sinusoidal nature of the alternating current which induces the magnetic flux in the rotor windings. Some of the electrical energy is converted to heat energy. Maximum temperature generated by the motor windings is a function of voltage and amperage and can range from 150˚F (65˚C) to 200˚F (93˚C).
When utilizing the motor as an immersion heater, there is a need to reduce flow rates. This allows the fluid to reach the temperature at which it starts to flow. Heavy oil viscosity reduces with the temperature as shown in figure 2. Around 55 ˚C and above the viscosity of heavy oil will be close to the light oil viscosity thus assuring flow.
The skin temperature of the electrical submersible motor is enough to heat the heavy oil to the temperature where no steam injection will be required to heat it separately. Although physically the application does not need special setups for using an ESP as an immersion heater, care is necessary to preserve equipment and prevent degradation resulting from the motor running hotter. The extra heat increases the risk of winding insulation failures.

Figure 2: Viscosity behavior of heavy and light oil with temperature