
NOVEDOSO CONCEPTO DE UTILIZACIÓN DE BOMBAS ELÉCTRICAS SUMERGIBLES COMO CALENTADORES DE INMERSIÓN
Las bombas eléctricas sumergibles (BES) son una fuente habitual de elevación artificial de los fluidos de un pozo. Cuando los fluidos de los yacimientos, a cientos de metros bajo la superficie de la tierra, no tienen suficiente energía para subir a la superficie, se utilizan bombas eléctricas sumergibles. Las bombas reducen la presión del fondo del pozo e imparten suficiente energía para que el fluido se eleve.
Las aplicaciones más comunes de los precipitadores electrostáticos son la producción de petróleo y gas, la calefacción térmica, incluida la calefacción urbana, la elevación de lodos de las minas profundas y la deshidratación de las minas de carbón. Elevan los fluidos a la superficie de forma económica. Sin otros métodos de elevación, conseguirlo es difícil y nada económico.
Las bombas eléctricas sumergibles generan calor como subproducto de su funcionamiento. Este calor suele considerarse una molestia, ya que degrada el motor y reduce la vida útil del sistema. La aplicación está diseñada para garantizar que se genere un caudal suficiente alrededor del motor eléctrico sumergible, de modo que el fluido de elevación enfríe el motor. Este artículo explora el novedoso concepto de utilizar el motor sumergible como un calentador de inmersión, poniendo así ese calor generado en un propósito útil.
Principales componentes de la ESP
Las bombas eléctricas sumergibles constan de cuatro conjuntos principales que se conectan con bridas para formar un ESP. Tienen un motor sumergible en la parte inferior, que se conecta a un protector que a su vez se conecta a un separador de gases o a una toma. El separador de admisión o de gases se conecta mediante una brida a la bomba.
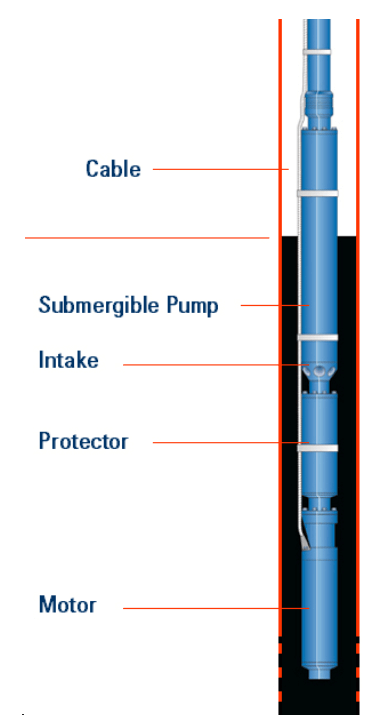
Figura 1: Principales componentes de un sistema ESP
El motor sumergible transmite el par a la bomba a través de un eje. Este eje se conecta a través de un acoplamiento al eje del protector. A partir de ahí, se conecta a través de un acoplamiento a la admisión o al separador de gases. Por último, el eje se conecta al eje de la bomba acoplado por el acoplamiento. El motor de fondo de pozo consta de un rotor y un estator. La figura 1 muestra las principales partes del sistema de fondo de pozo.
El tipo de motor analizado en este artículo se centra en un motor de inducido de barras bipolar (2 polos) a 60 Hz. Hay algunas otras variantes de motores sumergibles que pueden utilizarse, por ejemplo, los motores de imanes permanentes.
Elección de motor
La elección del motor influye directamente en la cantidad de calor que genera. Cada motor consta de un rotor y un estator. El estator contiene un devanado eléctrico conectado a una potencia trifásica de 460-480V. Al cambiar la corriente alterna en la forma de onda sinusoidal, crea un campo magnético giratorio. Esto genera una corriente en los devanados del rotor que crea un campo magnético propio.
La interacción de dos campos magnéticos produce la fuerza de giro o torque. Parte de esta corriente se convierte en energía térmica debido a las pérdidas eléctricas en los devanados del motor y parte del calor se atribuye a las pérdidas por fricción, pero la cantidad de calor generada por las pérdidas por fricción es mínima en comparación con las pérdidas eléctricas.
Una parte importante es el protector acoplado al motor sumergible. Esto actúa como un sistema de compensación hidráulica y de sellado entre el duro entorno exterior y el aceite limpio de motor. El motor sumergible se llena con el aceite dieléctrico, que proporciona lubricación a los cojinetes del rotor y refrigeración a los devanados. Cuando la temperatura del motor aumenta, el aceite se expande y el protector proporciona el espacio para que el aceite en expansión se acumule. El protector cuenta con bolsas de elastómero que se expanden y contraen al cambiar el volumen de aceite.
Por qué el ESP como calentador de inmersión
La principal ventaja de utilizar el ESP como calentador de inmersión se da en aplicaciones en las que la densidad API del aceite o del fluido bombeado es inferior a 10. La densidad API mide la densidad de los productos petrolíferos con respecto a la densidad del agua. Si la API es superior a 10, el producto petrolífero es más ligero que el agua, por lo que flota. Si la API es inferior a 10, entonces el producto petrolífero es más pesado y se hunde.
Otras aplicaciones de los calentadores de inmersión ESP
Producción y refinado de petróleo. Las arenas bituminosas son tan espesas que se utiliza vapor para reducir la viscosidad del betún.
Las aplicaciones mineras incluyen lodos viscosos, que deben ser calentados y bombeados a la superficie.
El vapor se utiliza en muchas aplicaciones de fondo de pozo para reducir la viscosidad de los fluidos. Pero eso significa más instalaciones de superficie que requieren mucho capital y más emisiones de carbono. Otro aspecto es que la arquitectura de fondo de pozo es más complicada debido a la inyección de vapor, lo que requiere la inyección a través de una tubería de derivación o de otro agujero perforado cerca para introducir el vapor en el yacimiento.
Otro inconveniente del uso de vapor para reducir la viscosidad del petróleo es que las variaciones de temperatura del pozo pueden dañar el yacimiento. Esto puede provocar costosas reparaciones o, en el peor de los casos, el abandono. Si la energía del yacimiento es baja y se necesitan ascensores artificiales para elevar el fluido a la superficie, hay que utilizar una bomba eléctrica sumergible que no solo bombee el fluido a la superficie, sino que también lo caliente.
Efecto de la temperatura en la viscosidad
Como ya se ha dicho, el bobinado del motor crea un “campo magnético giratorio”. Esto se debe a la naturaleza sinusoidal de la corriente alterna que induce el flujo magnético en los devanados del rotor. Parte de la energía eléctrica se convierte en energía térmica. La temperatura máxima generada por los devanados del motor está en función de la tensión y el amperaje y puede oscilar entre 150 ˚F (65 ˚C) y 200 ˚F (93 ˚C).
Cuando se utiliza el motor como calentador de inmersión, es necesario reducir el caudal. Esto permite que el fluido alcance la temperatura a la que empieza a fluir. La viscosidad del aceite pesado se reduce con la temperatura, como se muestra en la figura 2. Alrededor de los 55 ˚C y por encima de ellos, la viscosidad del aceite pesado se acercará a la del aceite ligero, asegurando así el flujo.
La temperatura de la carcasa del motor eléctrico sumergible es suficiente para calentar el aceite pesado hasta la temperatura en la que no será necesaria la inyección de vapor para calentarlo por separado. Aunque físicamente la aplicación no necesita una configuración especial para utilizar un ESP como calentador de inmersión, es necesario tener cuidado para preservar el equipo y evitar la degradación resultante de que el motor funcione más caliente. El calor adicional aumenta el riesgo de que se produzcan fallos en el aislamiento del bobinado.

Figura 2: Comportamiento de la viscosidad del aceite pesado y ligero con la temperatura